


软体机器人(即具有软执行器的机器人)在设计制造上的优势在于可以较为容易且低成本地为它们配置各种各样且具有匹配性的安全配置。但它们的问题往往在于由于结构本身的特殊性,制作者在制作软体机器人的时候往往需要手工制作浇铸等模具。
而Dylan Drotman和Tolley UCSD实验室的学生们一起发明了一种新型的方法——用3D打印来制作软体机器人的足结构,极大地简化了制作工艺。使用这种打印方法,机器人的整个四足结构几乎可以轻松地被打印成一个单一的部分。但由于打印材料的性能要求具有特殊性,需要利用柔软橡胶材料和刚性材料的定制混合物来产生可调整坚固度的最终产品,一般的3D打印机难以做到。这次研究人员使用的是3D打印巨头Stratasys公司的Objet350 Connex3进行打印,其成本也是非常昂贵的。
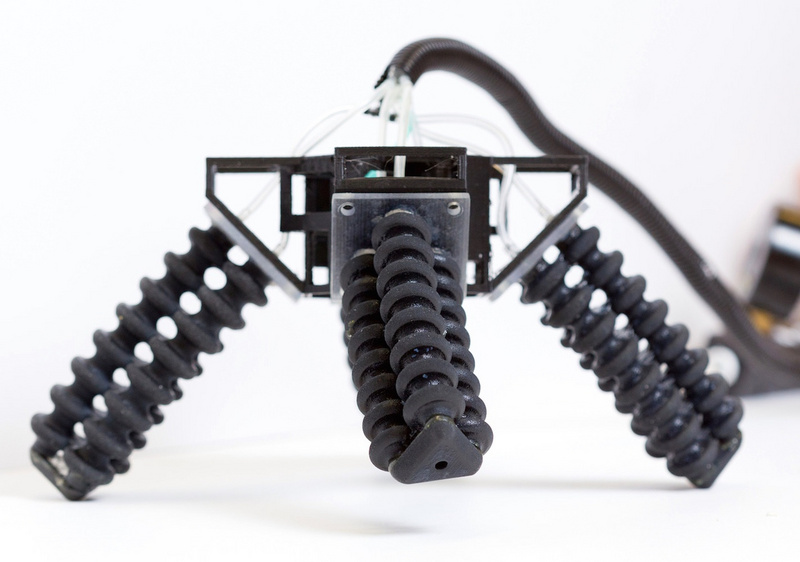
在机器人的腿部结构制作方面,如下图所示,腿部本身由三个柔性且可充气的橡胶管组成,粘合在一起以形成一个管状三角形的横截面。通过对两根管子进行充气,腿部将沿着未膨胀的管子的方向弯曲,形成一个可以在两个轴上控制的腿部结构。

机器人的四条腿以X形安装在一起,不仅像传统爬行机器人一样具有爬行的能力,而且可以抬起每条腿进行“走路”。凭借其运动的灵活性,研究人员可以测试它在诸如岩石、沙子或狭窄空间等不同环境下的步态并进行优化。
由于机器人不仅仅需要携带传感器等,有时还需要与有许多执行器的摄像系统相连,背后还具有加压空气源或电池等电子设备,这就要求它要有一定的承载能力。另外在承载方面,该机器人在从地面“起立”的过程中可以承受0.62公斤的载荷,在直立状态下还可以承受更大的重量。除此之外,研究人员还表示将会开发一种可以用于在可能对人体有害的危险环境中检测或获取传感器对相关参数的读取的无限制四足机器人。
随着工业4.0,互联网+,工业互联网概念等的提出,越来越多的创新科技在逐渐崭露头角。传统企业纷纷开始探求转型升级之路,科技是第一生产力,格局是一直在变化着的,在对新科技新技术的探索之路上永远没有终点,只有变化是常态。好工品作为紧固件行业的专业互联网B2B垂直交易平台,一直没有停止过对新思路新技术的追求探索,致力于为紧固件上下游用户提供最完备的服务,帮助企业转型 升级,降本增效,达成共赢。
素材来源(36氪)

评论
登录后你可以发表评论,请先登录。登录>>